

By Chris Ullrich, CTO at Immersion

Last month, I introduced the haptic stack, a conceptual framework that we use at Immersion to think about the key technology components of a delightful haptic experience. As a quick refresher, the stack consists of three key layers: design, software, and hardware (see last month’s post for more detail). These layers work together in a highly interdependent way to create a tactile experience that is harmonious with the overall UX of a product or experience. Product designers need to think carefully about the trade-offs in all three layers when designing a product.
This month, I’m going to dive into the hardware layer and explain some of the key choices and considerations unique to this layer. More than any other part of the haptic stack, the hardware layer dictates the range of possible experiences that can be created in a product; careful evaluation of the price/performance and complexity of each possible choice are critical. As every product owner knows, hardware choices are extremely hard and expensive to change as a product approaches its release date.
Psychophysics
The heart of any haptic system is the actuators, which are responsible for converting electrical signals into tactile stimulation of the user. To understand the specifications of actuators and how they relate to haptics, it is first necessary to understand the psychophysics of the human mechanoreceptor system.
This is analogous to visual displays; the color gamut, resolution, and refresh rate of a display work in a similar way in the human vision system.
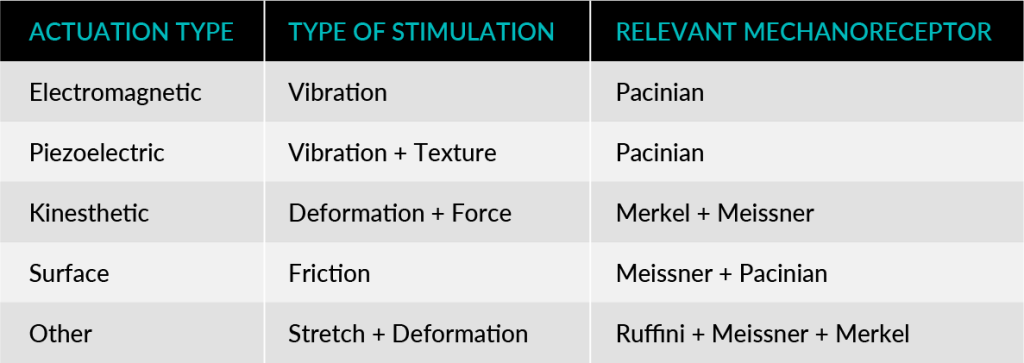
In haptics, we think broadly about the four classes of mechanoreceptors: Merkel, Ruffini, Pacinian, and Meissner. These four receptors broadly sense vibration, surface texture, deformation, and pressure. They work together to provide nerve pulses to the brain that enable the tactile sensation of the world. The signals from these nerves are merged in the brain to create a tactile perception of the world. The goal of a haptic actuator is to stimulate one or more of these mechanoreceptor systems to create a touch experience.
Actuator types
For a haptic system, it is useful to think about actuators from the perspective of the type of stimulation they provide. The various types are broadly summarized below.
Electromagnetic
Electromagnetic (EM) actuators are the most widely used for haptic feedback. Nearly 100% of mobile phones and almost every game controller has some type of electromagnetic actuator. There are four main sub-categories of EM actuators:
Eccentric Rotating Mass (ERM): These are rotational motors with an off-center mass mounted on the shaft. When voltage is applied to these motors, they vibrate as the off-center mass spins around. ERMs are good for low-frequency rumble type sensations but are quite slow, so they are not useful for precise haptics. Precision Microdrives has a great video showing how an ERM works.
Linear Resonant Actuators (LRA): These are linear actuators that consist of a mass on a spring and an electromagnet. The electromagnet is alternately charged and discharged, which results in the mass vibrating at a specific frequency. LRAs are extremely power efficient, and this makes them a great choice for mobile phones and other battery-powered devices. Again, Precision Microdrives has a great video showing how LRA’s work.
Voice Coil (VCM): These are basically identical to LRA actuators but also have a broad frequency response. VCMs are commonly found in speakers but can be adapted to create vibration experiences. VCMs typically use more power than LRAs but are also able to produce a much richer and more realistic tactile stimulation.
Solenoid: A solenoid is a type of electromagnetic actuator that works by moving a mass mounted on a spring when a coil is charged. These are somewhat similar to LRAs in concept, but in practice, they draw a lot of power and have a purpose-built and limited range of experiences. These actuators are common in automotive haptic devices.
Piezoelectric
Piezoelectric (PZT) actuators are also widely used in many products but have only recently become viable as haptic actuators. PZT actuators work by deforming a solid crystal structure when a charge is added or removed. They are widely used in precise positioning systems (e.g., atomic force microscope) but also as actuators in extreme environments (e.g., inside a combustion engine or in spacecraft). PZT actuators require higher voltages than electromagnetic actuators and also need to be integrated into a mechanical structure to produce useful haptic sensations. PZT haptic actuators are comparable to VCM’s in their ability to generate rich vibration experiences.
Kinesthetic
Kinesthetic haptics is haptic feedback that pushes on the user. This type of feedback typically uses electromagnetic actuators, along with a mechanical transmission to create forces on a user. Examples include force-feedback joysticks and steering wheels for gaming and the forthcoming trigger haptics on the Sony PS5 controller. Kinesthetic feedback is normally only used in application-specific devices due to its cost and mechanical complexity.
Surface
In the past few years, surface haptics has become a viable commercial solution. Surface haptics works by either increasing or reducing the friction between a fingertip and a surface. The resulting haptic experience is very different from vibration in the sense that a surface can feel sticky or slippery, and this is dynamically controllable. Two leading commercial solution companies in this area are Tanvas and Hapt2U. A key drawback of current surface haptics solutions is that it is difficult to create confirmation type effects, so surface haptics is usually considered as a complementary technology to electromagnetic or piezoelectric.
Others
There are a variety of other haptic actuator technologies, but none of them are widely used in CE devices or automotive. Examples include ultrasonic, electroactive polymers (EAP), electrorheological fluids (ER), and shape memory alloys (SMA). All of these other technologies have unique physical properties that make them suitable for haptics but have not yet reached a level of maturity where they are appropriate for mass-market product offerings.
Electrical Considerations
Each of the actuator solutions described above needs to have a driver IC or amplifier that can convert haptic effect signals into drive signals to the actuators. In most cases, the electrical solution is dictated by the actuator, as each one requires a specific type of drive signal. When evaluating driver offerings, some of the key features that matter are:
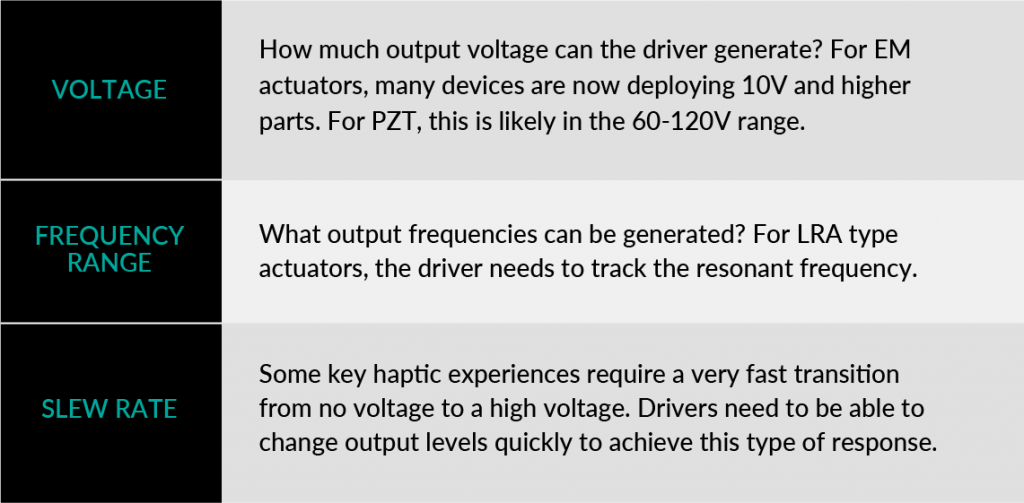
There are many other driver specifications on the digital side that we won’t get into this month, but needless to say, it is important to choose a driver IC and an actuator together and with the haptic UX of the whole system in mind.
Summary
Actuator selection for a haptic product is probably the most impactful decision a product team can make, as it both drives the majority of the cost and also defines what types of haptic experiences are possible. It is hard to overstate the importance of this. With the wrong selection, the haptic experience can be irritating to the point where users disable it. With the right hardware selection, a haptic experience can engender delight and high-value interactions.
Choosing an actuator can be complex and confusing, particularly since there are no standards to help product designers compare and evaluate the haptic capabilities of specific offerings. At Immersion, we’re working with the ecosystem to solidify and create common specifications for actuators so that end-users can more consistently get high quality, delightful feedback from their devices.
Immersion has published some guidelines on the types of tests that can help make this decision, see Immersion’s HD Actuator Section and Testing Guidelines here.
Related articles: